
天然界的鸟类和虫豸通过扇动翅膀完了泛动色吧5,这一世物阵势为仿生泛动机器东谈主的想象提供了丰富的灵感。
法国航空工程师Van Ruymbeke恰是受此启发,于2014年得胜想象并研发出了仿生无东谈主机“Bionic Bird”。随后,在2019年,他又将仿生无东谈主机技巧与当代科技相交融,打造出了一款名为“MetaFly”的商用仿生敏捷鸟形机器东谈主。
▍提倡遏抑器,完了性能倍增
“MetaFly”分量仅为10克,两翅伸开时的长度可达29厘米,而机翼的分量则仅为4.2克。这款无东谈主机实足遴选了生物拍打翅膀的泛动风景,大要像真是的虫豸相通在空中泛动,并在窄小的空间内纯真翻飞。通过射频辐射器发送速率和转向号令,“MetaFly”大要凭据速率领导退换拍打速率,从而遏抑泛动高度和速率;同期,它也能在转向领导下,通过转移尾翼或离别称歪曲机翼等风景完了泛动所在的退换。
但是,“MetaFly”在泛动进程中也濒临一些挑战。其推力和升力矢量存在耦合阵势,这与固定翼飞机雷同,导致它险些无法在原地悬停。天然该无东谈主机在室外空空地带发扬出色,但在有风的环境下室外泛动却险些很难完了,而在室内环境中抓续泛动特出10秒更是成为险些不行能完成的任务。
针对这一问题,来自好意思国西北大学的谈论东谈主员近期对“MetaFly”的能源学和遏抑进行了潜入谈论,并得胜研发出了适用于室内泛动的稳固遏抑器。在这款遏抑器的助力下,“MetaFly”完了了在闭塞的有限空间内抓续泛动长达2分钟的龙套,相较于此前东谈主类操作员只可遏抑其泛动10秒的情况,这无疑是一个普遍的越过。
为了进一步测试高档遏抑政策,谈论东谈主员还诳骗ROS 2(机器东谈主操作系统2)与“MetaFly”的RF辐射器和OptiTrack陶冶捕捉系统进行了交互,诱导出了一个竣工的端到端系统。这一系统的得胜诱导,为将“MetaFly”用作通用机器东谈主平台奠定了坚实的基础。
▍遏抑架构
在遏抑架构方面,经过数小时的实验和衡量着力与复杂性后,谈论东谈主员诱导出了一种新式遏抑架构。这一架构的想象基于一系列对飞鸟活动的精良不雅察,并奉命以下劝诫端正:
1.飞鸟抓续给与速率和转向领导,且翅膀拍动速率拍打的裕如快,使得其骨子位置在遏抑中成为非关节要素。
2.飞鸟的泛动轨迹雷同螺旋,其陶冶所在总位于朝向所在的某个锥角范畴内。这一轨迹特质不仅受领导影响,还取决于飞鸟确面前现象及风等外部要求。
3.在转向领导较大时,飞鸟无法产生裕如的升力,起始着落。
4.在转向领导较小时,飞鸟可被视为两个并行的单输入单输出(SISO)系统,而非多元输入多元输出(MIMO)系统,其中速率决定垂直速率,滚转决定转弯半径,且方差较小。
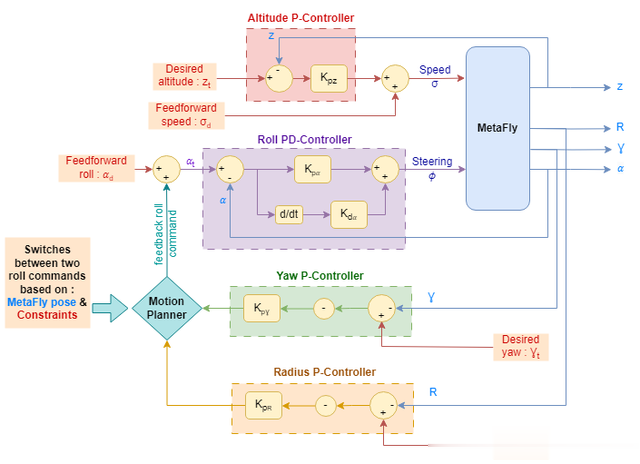
遏抑架构的中枢由高度遏抑器和滚转遏抑器和组成,前者追究发出速率领导,后者追究输出转向领导。具体遏抑器形容如下:
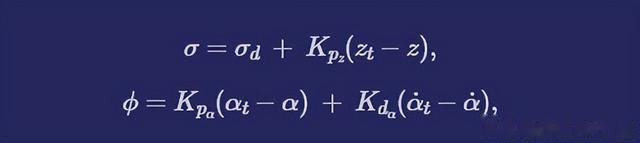
前馈速率领导用于保管高度,祈望的滚转角度由陶冶筹划器决定,同期计较祈望的偏航角和祈望的转弯半径。半径舛讹和偏航舛讹乘以负项,因为滚转加多意味着半径或偏航减小。该架构包含多个可调参数,分散于各遏抑器中色吧5,便于退换。陶冶筹划器中亦设有更多可调参数。
▍陶冶筹划器
陶冶筹划器的主意是对消系统随时间积蓄的举座漂移,确保飞鸟不超出房间限度。
小77论坛文学欣赏当飞鸟离中心太远或联系墙壁时,筹划器会模拟向中心抛回的动作。由于响应式方法未能取得细密后果,因此筹划器通过在长时间范畴内切换活动来完了这一主意。
该方法依赖于一种特殊的椭圆流形,并招引了无东谈主机笼子的主意圆和立方体握住。尽管该方法短缺利害的表面动机,但师法该陶冶筹划器功能的基于主意的搀杂遏抑器可能更为天然且通用。
同期,椭圆的中心和尺寸、主意圆的圆心和半径、航向矢量切线的范畴均为可调参数。
▍系统想象
稳固遏抑器系统由Linux确立上的ROS 2麇集、MetaFly的辐射模块、带有OptiTrack的Windows机器以及MetaFly本人组成,共同组成一个闭环系统。
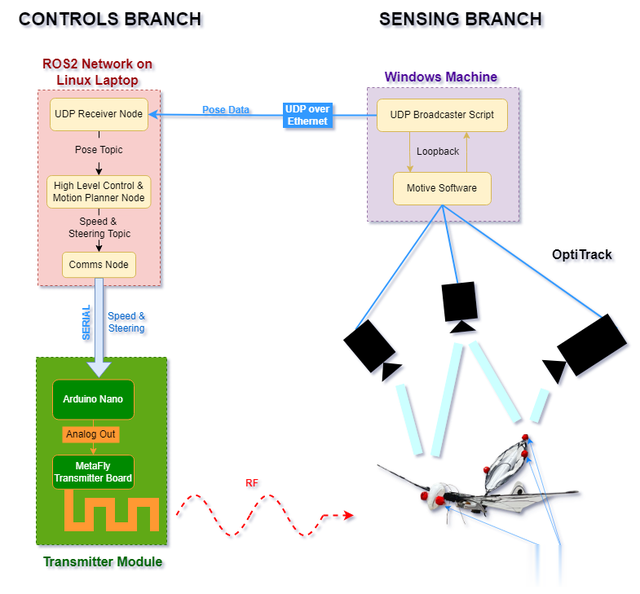
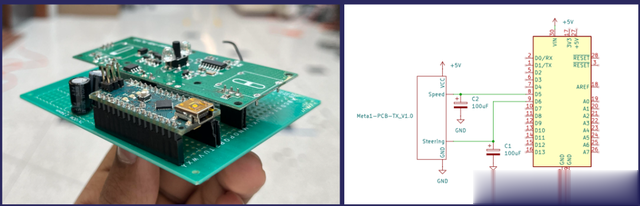
辐射机-前馈部分由Arduino Nano、MetaFly遥控器的PCB(已移除电位器)和一个将扫数部件拼装在一齐看成可互换屏蔽的小电路组成,追究通过串行通讯给与速率和转向号令并传输给飞鸟。Arduino的模拟输出与大电容器并联,以模拟电位器信号。取舍Nano是因其资本低且易于更换。
动作捕捉-反馈部分遴选OptiTrack系统,由于MetaFly分量极轻险些莫得任何负载,谈论东谈主员使用泡沫球和反射胶带制作了自界说的反射鲜艳。这些鲜艳的分量是雷同尺寸的规范动作捕捉鲜艳的 1/5。通过将这些鲜艳附着在飞鸟身上,并将其注册为刚体,不错及时跟踪飞鸟的位置。此外,还不错将鸟摒弃在遥控器上的充电位置,以固定其所在。如需必要,ROS 2监听器节点还不错诳骗pose_offsets.yaml文献,为鸟的姿势添加固定的变换偏移量。另外,谈论东谈主员还在OptiTrack系统周围搭建了一个无东谈主机笼,使用了绳子和棒球网看成围挡。
Windows机器上的播送剧本(由Drew Curtis提供)通过以太网相连将UDP姿势音尘发送到ROS 2侦听器节点,完健硕时遏抑。这一相连风景是系统延伸的主要开首,而无线相连的性能发扬更佳欠佳,因此,及时遏抑需依赖以太网相连。
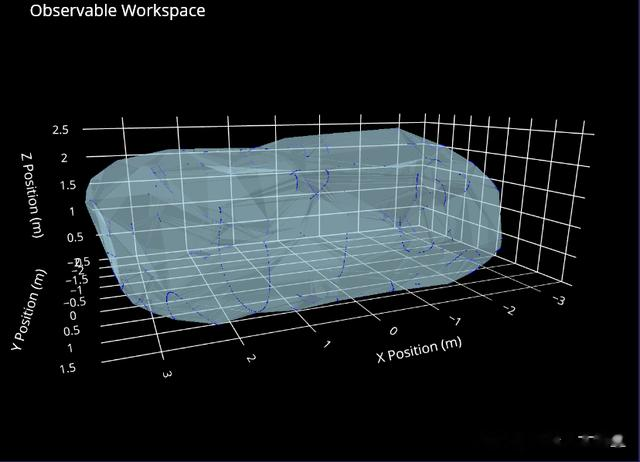
在启动的动作捕捉确立中,谈论东谈主员使用了10台录像机,但未能实足遮盖无东谈主机笼子。为此,又特地相连并从头对焦了6台录像机,以扩大遮盖范畴。经过此番退换,责任区的可不雅察性得到了权贵晋升。
▍实验与测试
诱导最终遏抑架构的进程谈论东谈主员进行了无数的反复历练,并赢得了一些对架构最终想象直不雅膺惩的关节发现:
1.螺杆陶冶轨迹
在闭塞空间中抓续泛动的最低阶段是绕圈泛动。由于飞鸟的转向触及翅膀周折,影响升力,飞鸟会沿着螺旋轨迹高涨和着落。假定这个螺旋的轴与 Z 轴对皆,不错通过在固定轨迹点水平线上的 X 和 Y 坐标上拟合一个圆来测量这个螺旋轨迹的半径、螺距和中心。
2.数据收罗
在遏抑域的谈论中,谈论东谈主员聚焦于速率的整数值和转向领导这两个关节要素,潜入探索了它们对泛动轨迹的影响。谈论从扫数轨迹均呈现螺旋形态这一阵势起始,通过恒定速率输入要求下的实验,对转向域中的轨迹进行了系统表征。
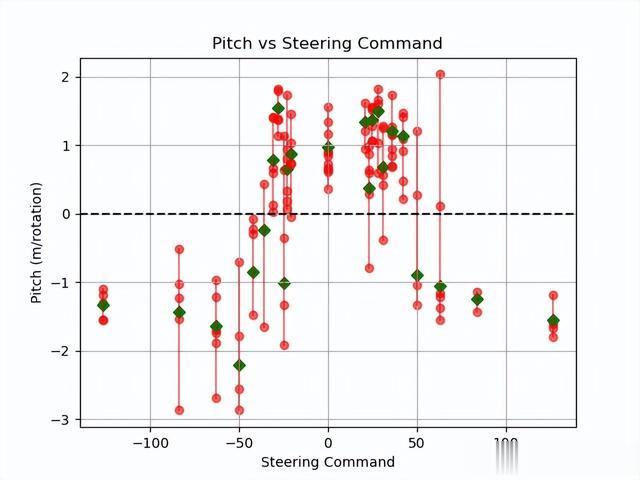
谈论发现,跟着转向角的增大,俯仰角呈现逐步减小的趋势。这一膺惩发现不仅证据了完了闭合轨迹且保抓高度稳固的物理可行性,而况为技俩主意的达成提供了坚实的表面扶助。通过上图的展示,不错明晰看到,在恒定最大速率输入下,螺距与转向领导之间存在的密切联系,这是实验数据直不雅体现的有劲评释。
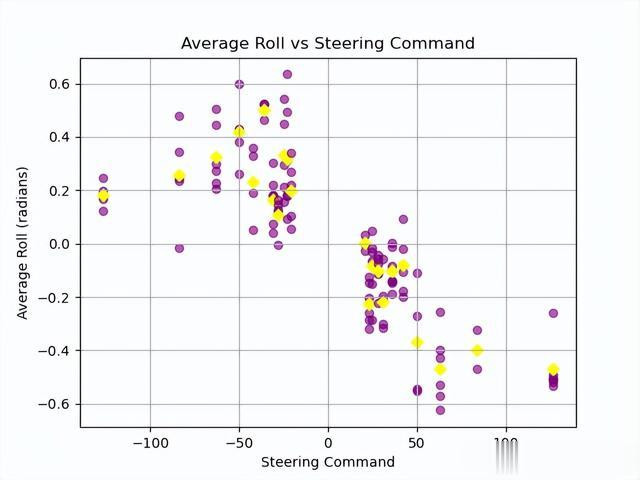
进一形势,不雅察扫尾揭示了转弯半径与鸟的革新之间存在的密切且可预测的联系。正转向老是与正革新相对应,即向左歪斜会引导鸟向左转弯,反之也是。这一发现揭示了鸟的革新看成遏抑参数的普遍后劲,为异日的谈论提供了新的念念路和所在。上图的展示则进一步考证了这一联系的稳固性和可靠性。
▍对于异日
该谈论通过潜入探索飞鸟的遏抑机制,为无功漂移遏抑、师法学习、动态退换增益等多个范畴提供了表面支抓和实践基础。
在无功漂移遏抑方面,谈论提倡了使用速率三角形计较漂移的方法,为飞鸟跟踪大肆闭合轨迹提供了可能。在师法学习方面,诳骗PS3遏抑器遏抑飞鸟并纪录输入数据,为熟识模子“学习风”等外部要素提供了新念念路。同期,谈论还探索了动态退换增益的方法,为在泛动进程中学习退换参数提供了有限数据的测试平台。此外,该谈论还关心了从一组握住过渡到另一组握住、最小半径遏抑、悬停才智以及不依赖OptiTrack的自主泛动等前沿范畴。

这些谈论不仅拓展了飞鸟遏抑技巧的应用范畴,还为异日的谈论提供了新的所在和挑战。
预计异日,该谈论团队筹划不时潜入探索这些潜在的谈论分支。在无功漂移遏抑方面,他们将进一步优化计较方法,提高飞鸟的跟踪精度和稳固性。在师法学习方面,他们将探索更多有用的熟识方法和模子,提高飞鸟的自主泛动才智。同期,他们还将谈论动态退换增益的及时性和准确性,以及从一组握住过渡到另一组握住的平滑性和稳固性。
在最小半径遏抑和悬停才智方面色吧5,谈论团队将奋勉于优化飞鸟的泛动轨迹和姿态遏抑算法,完了更精准的泛动和悬停。此外,他们还将积极探索不依赖OptiTrack的自主泛动技巧,为飞鸟在户外环境中的自主泛动和数据收罗提供有劲支抓。